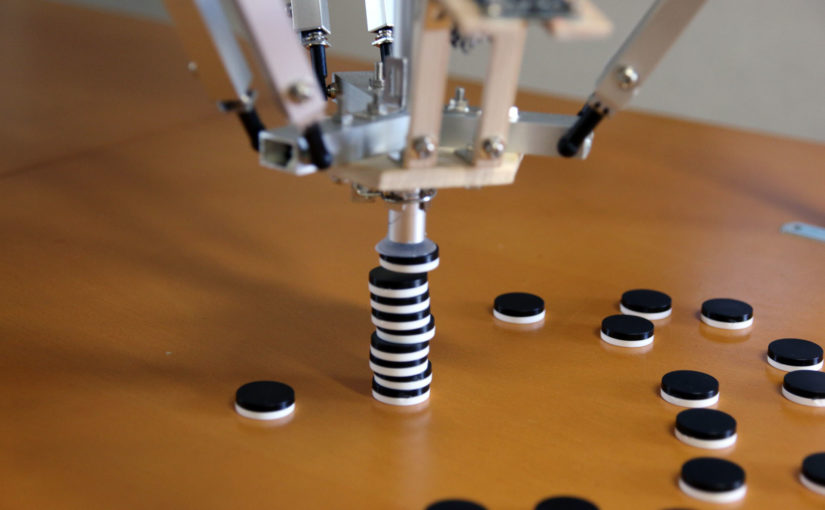
In the previous post, I wrote about how I decided to build an Arduino Delta Robot. In this post, I will show you how I added some simple Computer Vision to the project.
Continue reading Adding Computer Vision to the Arduino Delta Robot
In the previous post, I wrote about how I decided to build an Arduino Delta Robot. In this post, I will show you how I added some simple Computer Vision to the project.
Continue reading Adding Computer Vision to the Arduino Delta Robot
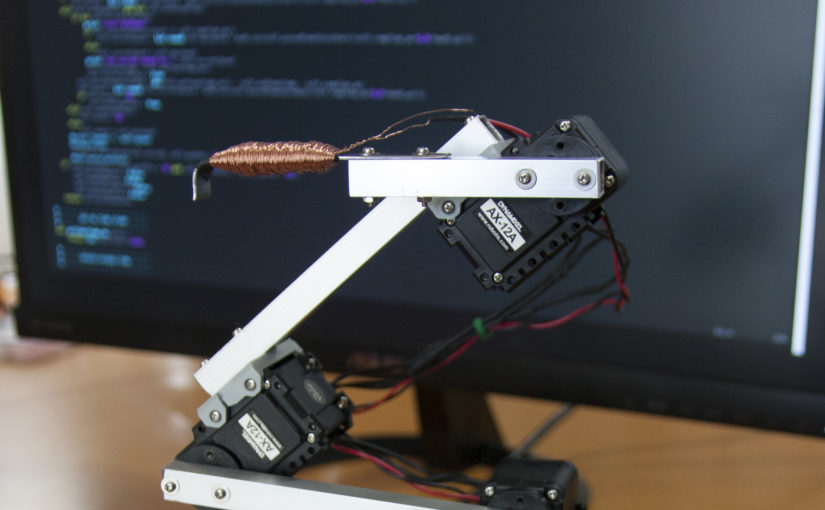
This entry is about a small Raspberry Pi robot arm I made more then a year ago. I used Dynamixel AX-12A servos. They are quite expensive. But the rule “I payed more so it ought to be better” applies; What you get are very easily configurable strong smart servos. The “smart” just meaning that you can control them via serial bus.
Continue reading Raspberry Pi Robot Arm with simple Computer Vision
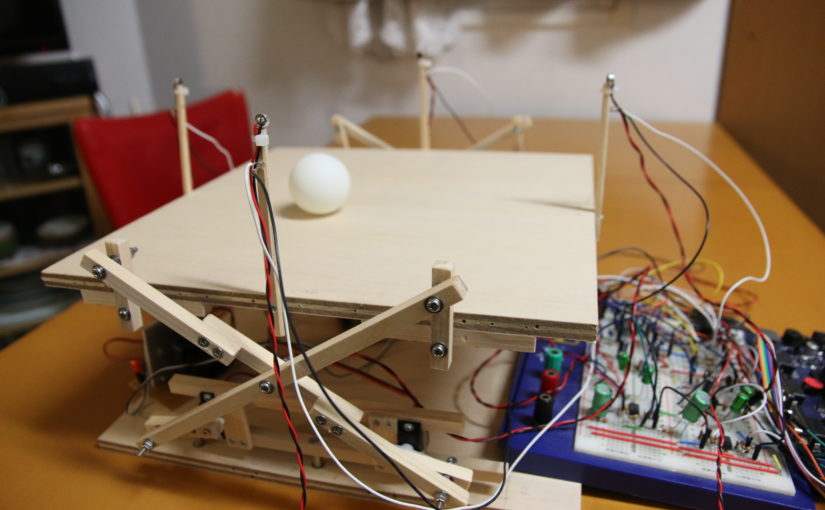
This entry is about the quest to get a machine to juggle a ping pong ball.
I started thinking about a ping pong ball juggler 2 years ago. And it was around that time that I built the first one of them. it uses LED – Photo transistor pairs to “see” when and approximately where the ball comes down. I used 4 micro servos to move a wooden plate. It’s the machine in the first YouTube video.