It’s been 5 years since I posted something. Blogs going silent; It’s a common thing, isn’t it? And this blog was following that trend for a while. So what was I doing all that time? I’ll give you the short summary: kid was born, made an indie game, made another indie game, changed jobs.
So now I’m tapping on my keyboard again. Why now though? I thought it might be nice to revisit my old hobby of making useless machines. So that’s what I am doing lately; Working on the next machine.
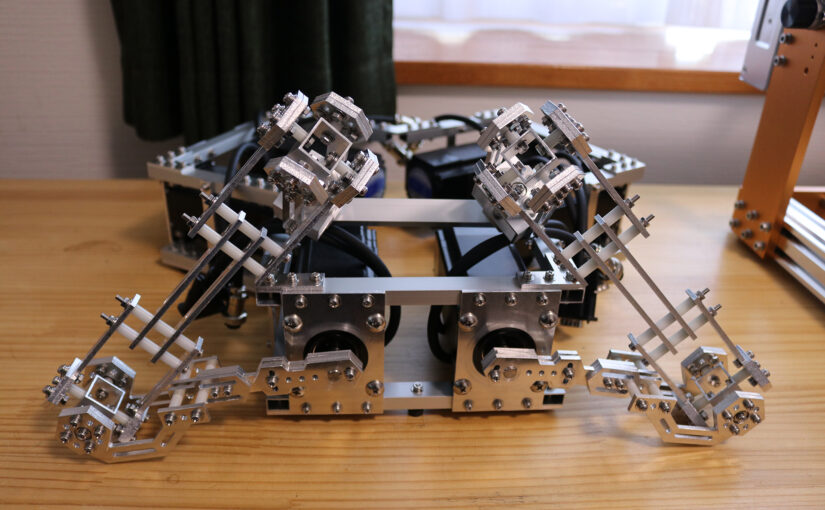
The Octo-Bouncer: Advanced Bouncing Patterns
Roughly three months have passed since I wrote my initial post about a machine I call “The Octo-Bouncer.” What has happend since then? In this post I talk about what parts of the machine were updated. Why they were updated and what kind of stuff the machine is able to do thanks to these updates.
Continue reading The Octo-Bouncer: Advanced Bouncing Patterns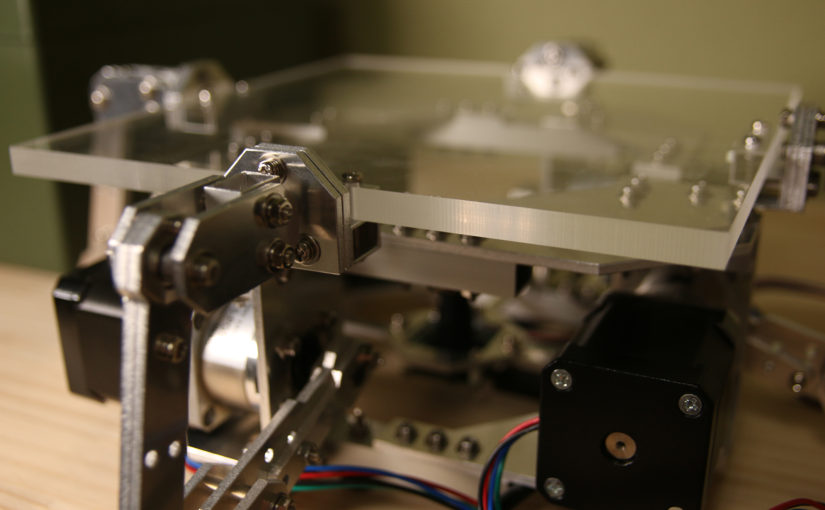
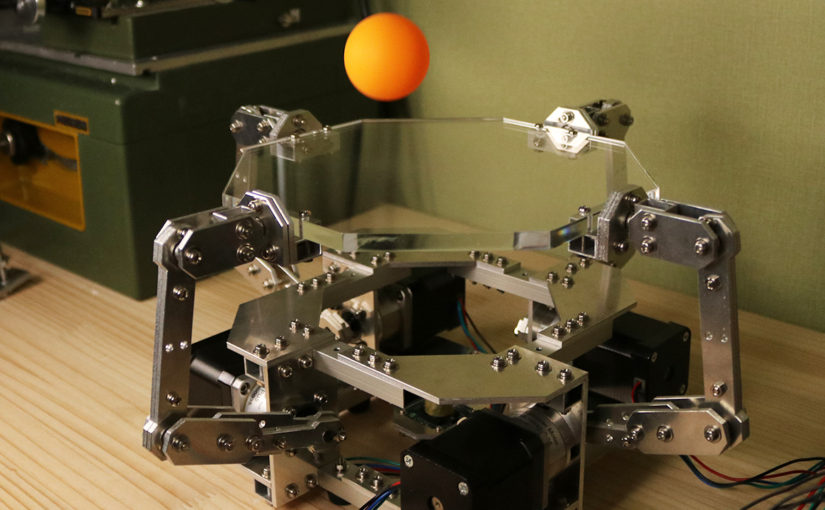
The Octo-Bouncer
I started thinking about ball juggling machines in the year 2015. I wrote about my first few attempts at creating them in this blog post from the year 2017. In 2018 I wrote another post about my then newest build. We’re now in the year 2020. And finally, the quest to get a machine to juggle a ping pong ball reliably has come to an end (as this current build is able to keep the ball bouncing for hours.)
Continue reading The Octo-Bouncer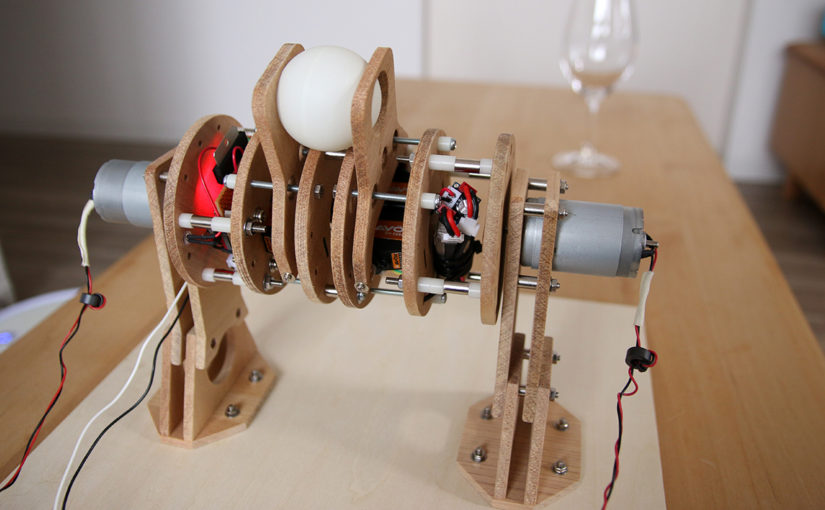
Ball Throwing Machine
Can we get a machine to throw a ball with good precision? That’s the challenge we’re facing in this blog post. I gave it a shot. In this post, I go through the building process and describe what I ended up with.
Continue reading Ball Throwing Machine
The Benbox CNC 1310
I bought a Benbox CNC1310. As of now, I did some simple wood milling jobs. I am very pleased with the build (all aluminium/copper/metal – no plastic parts whatsoever.) The only negative aspects that come to mind are the limited workspace (130mm x 100mm, hence the “1310”) and the cheap clamps (the things to hold down the workpiece while milling.) Everything else is very nice. This is a machine well worth its money.

Solving the Differential Equation of a Falling Raindrop
For some reason, I found myself wondering about an old problem I did at university. It was about finding the velocity function of a falling raindrop with air resistance proportional to the velocity squared. In exploring a way to get to the solution, we wade into the sticky territory of differential equations.
Read more here: RaindropWithAirResistance
ESP32 Micro Robot Arm
Talk about cheap stepping motors and there’s a good chance someone will mention the “28BYJ-48”. Or maybe he or she will not remember the part number and say something along the lines of “That 3 dollar stepper used in air conditioners! You know! B28 something!” Truth be told, it doesn’t get much cheaper than 3 dollars. The 28BYJ-48 is the queen of ultra-low-cost steppers.
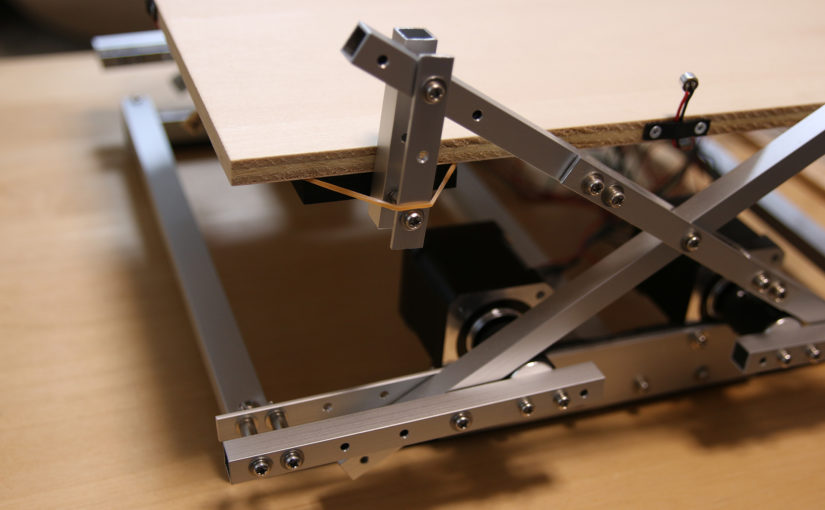
Afterthoughts On Arduino Bouncing Ball on Plate Machine
Some years ago I started a Quest to get a machine to juggle. Some weeks ago, I yet again found myself working on a machine with the goal of getting a ball to bounce on a plate without falling down. And bouncing it does. But is the quest now finally finished? Is the holy grail of continuous ball-bouncing reached? The short answer is “No.” and I will probably not spend any more time on the current iteration of this DYI robotics nightmare.
Continue reading Afterthoughts On Arduino Bouncing Ball on Plate Machine
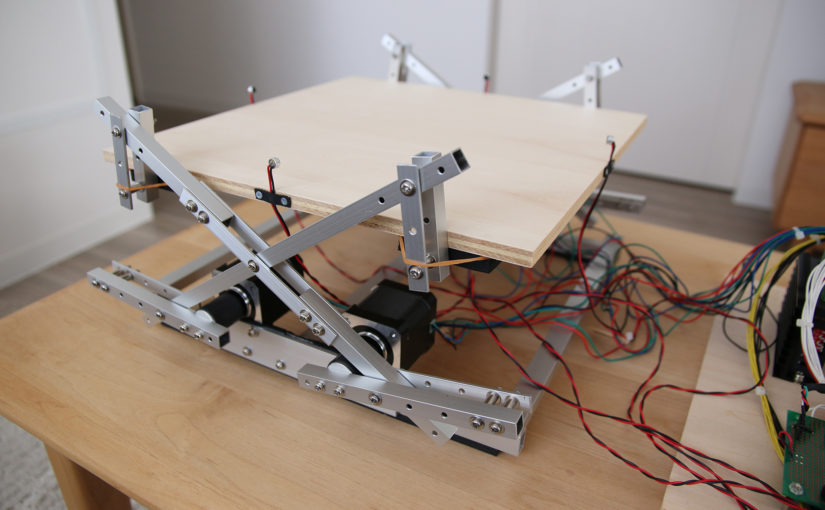
Keeping a Ball Bouncing With 4 Mics
This is a PID controlled ball on a plate machine with the sole goal of keeping the ping pong ball bouncing for as long as possible. I have been trying to build ball bouncing machines for a while now. This is the newest iteration!
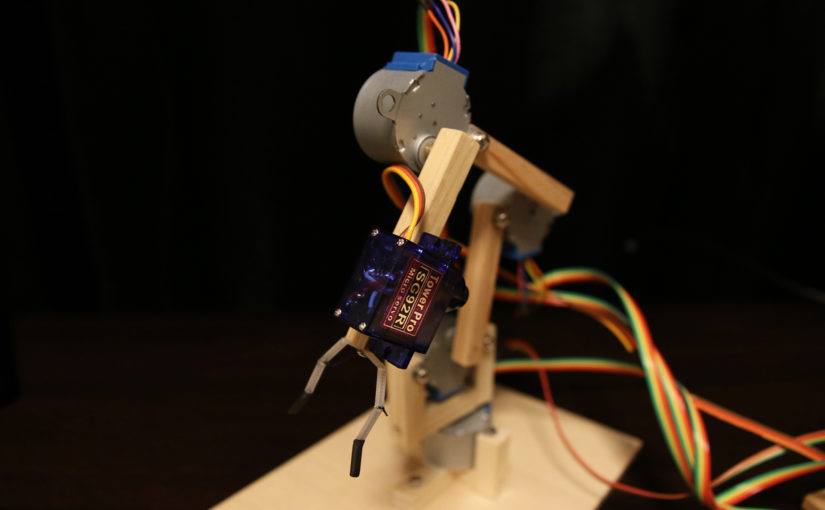
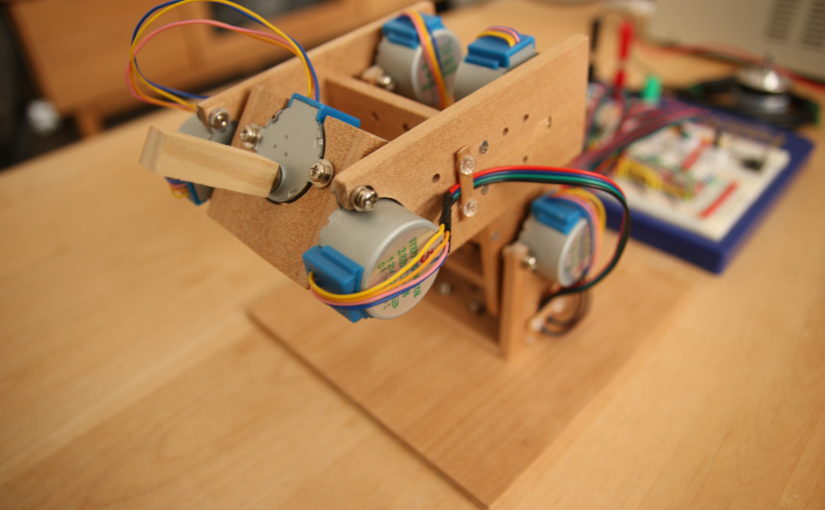
Small Stepper Robot Arm
This entry is about a small stepper robot arm I made a while ago. In this post, I will first talk a bit about how I built it and what my thoughts were while doing so. After that, I will show some moving footage of what the thing is able to do. Continue reading Small Stepper Robot Arm